技术专栏 当前位置:首页 > 资讯中心 > 技术专栏
巡检机器人导航和定位方式之--激光雷达SLAM
发布时间:2018-05-18浏览次数:17740字号:小中大
Simultaneous Localization And Mapping,简称SLAM,通常是指在机器人或者其他载体上,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。SLAM技术对于机器人或其他智能体的行动和交互能力至为关键,因为它代表了这种能力的基础:知道自己在哪里,知道周围环境如何,进而知道下一步该如何自主行动。它在自动驾驶、服务型机器人、无人机、AR/VR等领域有着广泛的应用,可以说凡是拥有一定行动能力的智能体都拥有某种形式的SLAM系统。当然工厂巡检机器人、IDC数据机房巡检机器人也必须具备这个基本的能力。
目前机器人SLAM主要的两种形式是:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM),这一节先讲述激光雷达的SLAM。
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到周围障碍物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。
激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
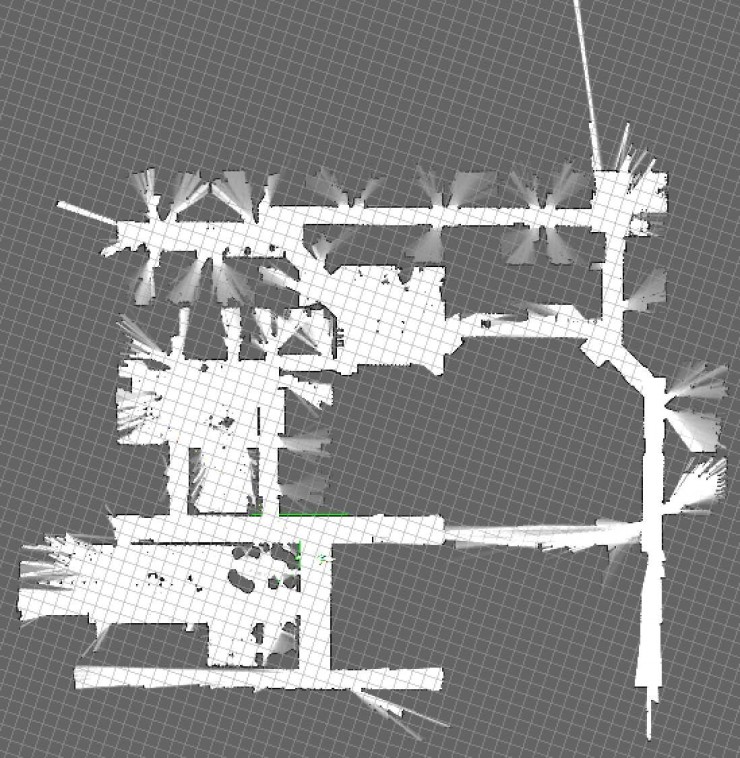
图1,激光SLAM的地图构建(谷歌Cartographer[1])
激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。
目前比较主流的室内行走机器人(如IDC机房巡检机器人,工厂巡检机器人等)几乎都采用这种导航定位方法。业界著名的激光雷达厂家有美国Velodyne、德国西克、日本北阳等。国内也有好几家低成本方案的激光雷达厂家,如浙江蓝海、深圳镭神等等,尽管性能和进口产品相比还有不少差距,但是价格却只有进口品牌的20%左右。再要求不太严格的一些场合还是物有所值的。
璞数技术推出的DH01室内机器人定位导航方案就是以激光雷达SLAM为主要算法,同时还辅助以融合IMU和RGBD深度摄像头传感器。这套DH01方案,即使对于没有定位导航和ROS机器人知识的普通用户也是可以快速上手的。若感兴趣,请点击链接查看详情 http://www.yzrobot.cn/robot-SLAM.php
下一篇:MR7资讯安防机器人功能简介
