管道检测机器人
应用于管道内壁的远程视觉检查
F201 管道检测机器人
F201管道检测机器人主要应用于管道或隧道内壁的远程视觉检测, 可以对管道内壁的腐蚀情况、焊缝缺陷、裂纹、漏点等提供全方面的检测诊断。F201管道检测机器人可实现全自主行走或远程遥控行走; 搭载的摄像机云台可进行360度无死角查看; 配置的高清摄像头有光学变焦功能(4倍/18倍), 可对管道内壁的细节放大观察; 可选大功率射频发射图传模块或WIFI模块来传输视频图像, 可深入管道1000米以上仍保障稳定清晰实时视频图像. 产品防尘防水的设计等级为IP64
F201 管道检测机器人的主要技术性能如下表:
F201 管道检测机器人的主要技术性能如下表:
| 功能描述 | 对管道内壁进行远程遥控视觉检测, 关注内壁是否有腐蚀、裂纹、漏点等缺陷 |
| 使用场所 | 适用于内径40~160厘米的各种管道(金属管\塑胶管\水泥管\陶瓷管等等)检查 |
| 尺寸和重量 | F201-A: 28(H)31(W)38(L), 3KG; F201-B:55(H)38(L)38(L), 5KG |
| 无线遥控与图传 | 可选大功WIFI模块(200米)或FPV无线远距离图传模块(2000米) |
| 运动底盘及驱动 | 四轮驱动,力矩大,爬坡越障能力强 |
| 视频摄像头规格 | 采用雄迈微光高清可变焦(默认4倍)摄像机,图像质量1920X1080像素 |
| 红外热图像采集 | 非标配模块, 需要时可选FLIR AX8工业摄像头, 温度分辨率0.1摄氏度 |
| 环境参数采集 | 非标配模块, 需要时另行可选配环境参数测量模块 |
| 机器人硬件平台 | 运动控制主板和云台控制板均为ARM架构的自主研发组件 |
| 机器人端软件 | 网络摄像头及图像传输为LINUX平台+无线模块,运动控制为UART方式 |
| 客户端监控软件 | 提供PC端(WINDOWS系统)操控软件或安卓手机及平板电脑机器人监控APP |
| 远程控制网路架构 | 机器人和客户端之间采用无线电图传(近距离)或者P2P对等网路(互联网)通信 |
| 机器人运动指标 | 行走速度0.2~0.8米/秒可选,最大爬坡角度20度,最大垂直越障高度5厘米 |
| 摄像头云台运动 | 水平旋转角360度,俯仰旋转角180度,云台运动在二维垂直运动坐标系下. |
| 机器人运动避障 | 超声波实时测距, 把机器人前进方向的障碍物距离发送给客户端 |
| 内置电池规格 | 标配内置电池为12.8V10AH 磷酸铁锂电池组 |
| 机器人自动充电 | 非标配模块, 需要时另行可选购 |
| 连续最大工作时间 | 对于充满电的机器人,可连续工作4小时(行走与定点观测各50%时间) |
| 连续最大行走距离 | 对于充满电的机器人,可连续行走3000M(0.4米/秒的巡航速度) |
| 环境防护等级 | IP64(防灰尘, 防水溅) |
| F201外观图 | 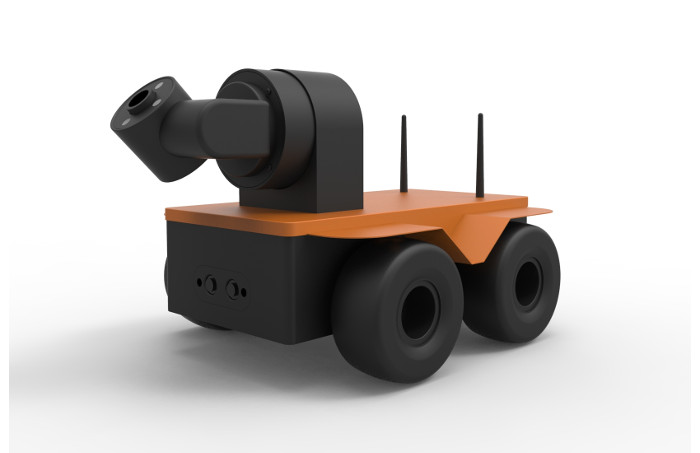 |
