ROS Robot kit
Open source robot platform
ROS robot platform YZ-01B Feature
YZ-01B ROS robot platform is a two wheel differential and large load robot motion chassis platform based on ROS architecture. It is very suitable for the use of ROS robot enthusiasts, college students and small and medium enterprise R & D engineers.
The chassis platform is an integrated hub motor with high efficiency and high load. The platform can load up to 50KG, and the maximum walking speed can reach 1 meters per second. YZ-01's built-in DCDC power conversion module can provide four different voltages of 5V, 12V and 24V, which can basically solve the power supply problems of the vast majority of computer motherboards and various sensors that the robot needs to carry.
In order to facilitate developers to do in-depth research, the ROS platform has build-in Intel Core-i5 industrial PC and installed UBUNTU 16.04 + ROS Kinetic OR Ubuntu 20.04 + ROS Neotic. At the same time, like other ROS platform robots, ROS robot YZ-01B provides open source basic ROS application examples and basic motion driven node programs that allow developers to use it very easily.
Further, we also provide android operating app apk for the user who does not good at ROS system. Via this android app you can easily drive robot, do SLAM and automatically navigate anywhere.
The chassis platform is an integrated hub motor with high efficiency and high load. The platform can load up to 50KG, and the maximum walking speed can reach 1 meters per second. YZ-01's built-in DCDC power conversion module can provide four different voltages of 5V, 12V and 24V, which can basically solve the power supply problems of the vast majority of computer motherboards and various sensors that the robot needs to carry.
In order to facilitate developers to do in-depth research, the ROS platform has build-in Intel Core-i5 industrial PC and installed UBUNTU 16.04 + ROS Kinetic OR Ubuntu 20.04 + ROS Neotic. At the same time, like other ROS platform robots, ROS robot YZ-01B provides open source basic ROS application examples and basic motion driven node programs that allow developers to use it very easily.
Further, we also provide android operating app apk for the user who does not good at ROS system. Via this android app you can easily drive robot, do SLAM and automatically navigate anywhere.
| Move base size | 45X40X37 CM | 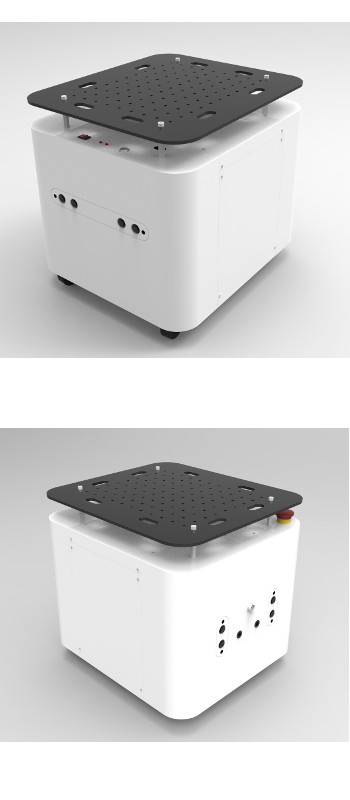 |
| Move base weight | 25KG(with battery) | |
| Move drive mode | two-wheel differential | |
| Battery required | 24V14AH LIFEPO4 | |
| Motor type | 12-24V wheel-hub motors | |
| ROS communication | RS232、USB | |
| DCDC provided | 5V2A、12V2A、24V4A | |
| Move speed | 0.1-1.0m/s | |
| Maximum load weigth | 50KG | |
| Externa charger | 28.8V6A smart charger | |
| Auto charging guide | LIDAR+ Infrared sensor | |
| Control Board | Industrial PC, CPU core is I5 | |
| Emergency stop | Push RED button | |
| Upper layer heigth | 50MM | |
| Open sources | Schematic drawing and source code |
Click here to download user manual
Click here to view a real field video
ROS robot platform YZ-01C Feature
YZ-01C ROS robot platform's main functions are same with YZ01B. But it is very suitable for commercial application developping. It has a ABS plastic cover and the frame is metal material.
The chassis is slight large than YZ01B but low profile size. The platform can also payload up to 50KG, and the maximum walking speed can reach 0.9 meters per second. YZ-01C's built-in DCDC power conversion module can provide four different voltages of 5V, 12V, 19V and 24V, which can basically solve the power supply problems of the vast majority of computer motherboards and various sensors that the robot needs to carry.
Same and YZ01B, this platform has build-in Intel Core-i5 industrial PC and installed UBUNTU 16.04 + ROS Kinetic OR Ubuntu 20.04 + ROS Neotic. At the same time, like other ROS platform robots, ROS robot YZ-01C provides open source basic ROS application examples and basic motion driven node programs that allow developers to use it very easily.
Further, we also provide android operating app apk for the user who does not good at ROS system. Via this android app you can easily drive robot, do SLAM and automatically navigate anywhere.
The chassis is slight large than YZ01B but low profile size. The platform can also payload up to 50KG, and the maximum walking speed can reach 0.9 meters per second. YZ-01C's built-in DCDC power conversion module can provide four different voltages of 5V, 12V, 19V and 24V, which can basically solve the power supply problems of the vast majority of computer motherboards and various sensors that the robot needs to carry.
Same and YZ01B, this platform has build-in Intel Core-i5 industrial PC and installed UBUNTU 16.04 + ROS Kinetic OR Ubuntu 20.04 + ROS Neotic. At the same time, like other ROS platform robots, ROS robot YZ-01C provides open source basic ROS application examples and basic motion driven node programs that allow developers to use it very easily.
Further, we also provide android operating app apk for the user who does not good at ROS system. Via this android app you can easily drive robot, do SLAM and automatically navigate anywhere.
| Move base size | 52X48X29 CM | 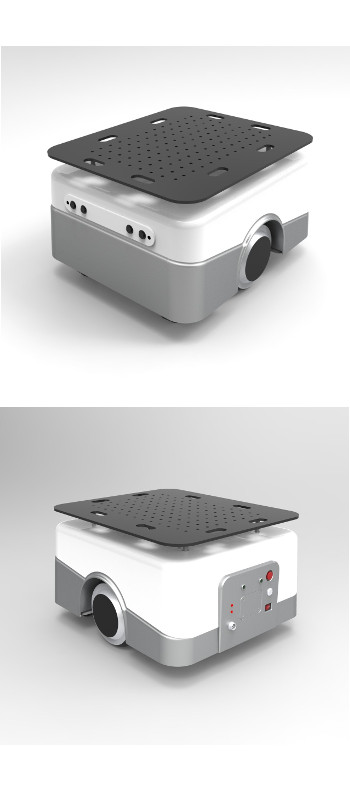 |
| Move base weight | 25KG(with battery) | |
| Move drive mode | two-wheel differential | |
| Battery required | 24V14AH LIFEPO4 | |
| Motor type | 12-24V wheel-hub motors | |
| ROS communication | RS232、USB | |
| DCDC provided | 5V2A、12V2A、24V4A | |
| Move speed | 0.1-1.0m/s | |
| Maximum load weigth | 50KG | |
| Externa charger | 28.8V6A smart charger | |
| Auto charging guide | LIDAR+ Infrared sensor | |
| Control Board | Industrial PC, CPU core is I5 | |
| Emergency stop | Push RED button | |
| Upper layer heigth | 50MM | |
| Open sources | Schematic drawing and source code |
Click here to download user manual
Click here to view a real field video
ROS robot platform: YZ-02
Compare with YZ-01, YZ-02 ROS robot platform is a four-wheels driving. The chassis is about 80x60X38cm and gross weight is 40Kg. It is designed for running outdoor applications.
YZ02 ROS robot kit use high power DC-gears motors with high efficiency and high load. The platform can load user's devices up to 80KG, and the maximum walking speed can reach 1.5 meters per second. YZ-02's built-in DCDC power conversion module can provide four different voltages of 5V, 12V, 19V and 24V, same as YZ-01 platform.
This ROS robot kit has a Intel i5 CPU industrial personal computer inside. The ROS system (UBUNTU 16.04 + ROS Kinetic OR Ubuntu 20.04 + ROS Neotic) are also installed in this industrial personal computer. Of course, YZ-02 also provides open source basic ROS application source code and basic motion driven node programs that allow developers to use it very easily.
Further, we also provide android operating app apk for the user who does not good at ROS system. Via this android app you can easily drive robot, do SLAM and automatically navigate anywhere.
| Move base size | 80X60X38 CM |  |
| Move base weight | 40KG(not include 24V14Ah battery) | |
| Move drive mode | Four-wheel differential | |
| Battery required | 24V14AH battery-pack | |
| Motor type | 2X24V 250W DC-gear motors | |
| ROS communication | RS232、USB | |
| DCDC provided | 5V2A、12V2A、19V4A 24V2A | |
| Move speed | 0.1-1.8m/s | |
| Maximum load weigth | 80KG | |
| Externa charger | 28.8V6A smart charger | |
| Auto charging guide | LIDAR+ Infrared sensor | |
| Control Board | Intel i5 CPU + STM32F107 ARM | |
| Emergency stop | NONE | |
| Deck layers heigth | 1st:15cm | |
| Open sources | Schematic drawing and source code |