Robots should select one or more technologies for algorithm optimization according to different application scenarios in order to achieve the desired positioning and navigation effect of users Providing targeted robot positioning and navigation algorithms is one of the main businesses of YZ Robot Co., Ltd. we have served many robot and AGV customers and provided them with satisfactory robot positioning and navigation solutions
YZ core technique highlight
| Motor motion controlling | LIDAR SLAM and mapping | Localization & Navigation | Computer vision analysize |
| Build-in dcdc conversion, motor drive, motion information feedback, PID algorithm, etc. Can control hub motor, precision steering gear, DC motor and other moving parts | Based on LIDAR, combined with GPS, visual features and UWB three auxiliary information, the map can be quickly and accurately constructed and its own position can be accurately positioned | It mainly deals with the fast path planning algorithm in specific areas (such as factory plant, warehouse, etc.), and can add boundary conditions according to customer requirements | The robot can collect and process visual images in real time, analyze them, and realize such as face recognition, vehicle recognition, object recognition, specified shape recognition, etc |
 |
 |
 |
 |
DH01 Robot SLAM navigation module
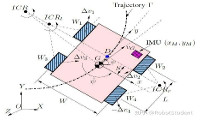
The hardware of DH01 robot SLAM navigation module is composed of four main components: industrial computer, 40m medium range lidar, IMU and depth camera. It can realize map construction, accurate positioning, path planning, motion navigation, automatic obstacle avoidance and other functions in general indoor and outdoor environments. For outdoor users, a differential RTK GPS module needs to be selected; For special scenarios such as galleries, pipe galleries, etc.; For the precise positioning of 1cm level, it is necessary to select the 2D code vision auxiliary module. Our DMCL (dynamic amcl) positioning algorithm uses the most economical hardware structure to free AGV from the constraints of traditional ground magnetic tracking navigation and realize real natural navigation.
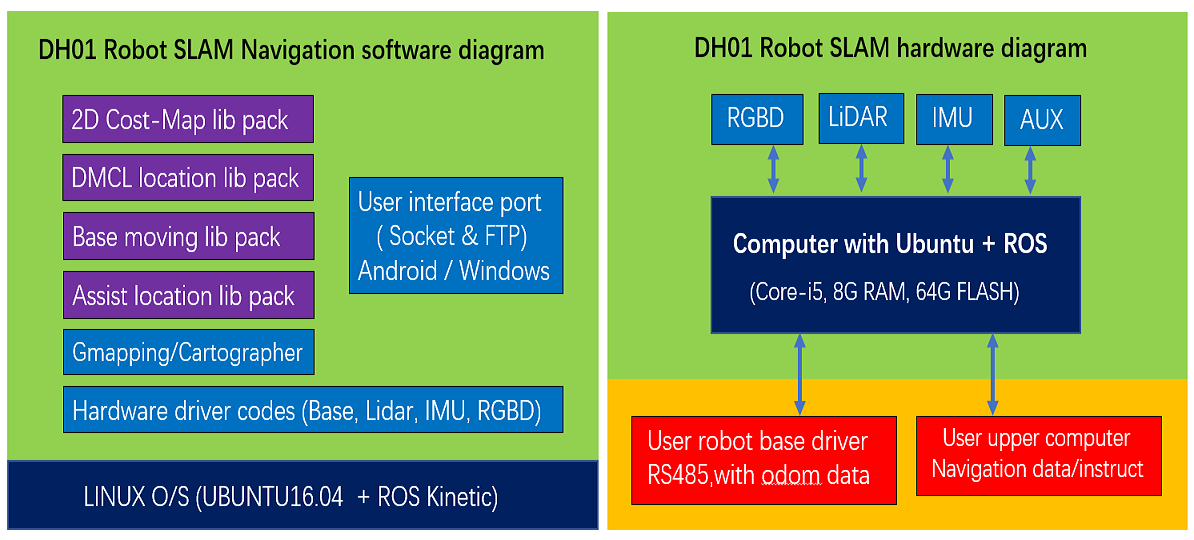
Using DH01 navigation scheme, robot and AGV product developers can use the positioning and navigation function as a standard part, so that they only need to focus their research and development efforts on the business function level that the robot AGV needs to achieve, which can not only greatly save the product development cycle, but also reduce the comprehensive cost of AGV. Hardware and Software block diagram of DH01 robot SLAM navigation:
Customer examples which using DH01:
 |
 |
 |
 |
 |