深圳璞数技术有限公司有三大核心算法优势:机器人定位、导航、视觉识别。依托这些技术优势,可以快速研发出适用于客户具体场地布局的机器人运动定位导航模组和算法,对接集成到客户机器人的运动控制系统, 帮助客户的机器人实现精确定位导航的要求.
若您对这方面的业务感兴趣, 随时欢迎您的垂询和指导.
研发优势
| 底盘运动控制技术 | 地图构建和定位技术 | 室内户外导航技术 | 视觉处理分析技术 |
| 集合电源变换、电机驱动、运动信息反馈、PID算法等。可控制轮毂电机、精密舵机、直流减速电机等运动部件 | 以激光雷达扫描为主,配合差分GPS、视觉特征、UWB辅助信息,实现快速准确构建地图以及自身位置精确定位 | 主要处理特定区域内(室内以及指定区域的园区厂区等)自动行走路径规划,可根据客户要求添加边界条件 | 机器人可实时采集和处理视觉图像, 进行分析,实现诸如人脸识别、车辆识别、物体识别、指定形状识别等 |
 |
 |
 |
 |
YZ-DH01机器人定位导航模块介绍
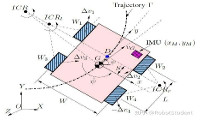
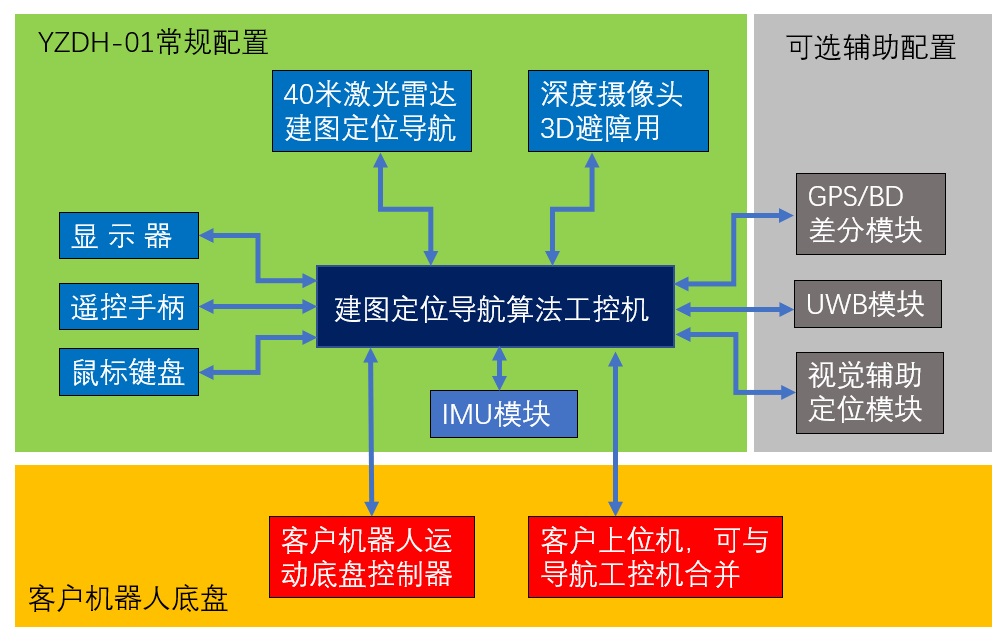
YZ-DH01机器人定位导航模块的硬件由工控机、40米中程激光雷达、IMU、深度摄像头这四个主要部件组成,可以实现一般室内外环境下的地图构建、精准定位、路径规划、运动导航、自动避障等功能。对于户外大场地用户,需要选配差分GPS/BD模块;对于长廊、管廊、等特殊场景,需要选配UWB模块;对于需要1厘米级的精密定位,需要选配二维码视觉辅助模块。璞数技术依靠独有的优秀DMCL(动态蒙特卡洛)定位算法,用最经济的硬件结构,让AGV摆脱了传统的地面磁循迹导航的束缚,实现了真正的自然导航。
使用YZ-DH01导航方案,机器人和AGV产品开发者可以把定位导航功能当作一个标准部件使用,这样就只需要把研发精力放在机器人AGV要实现的业务功能层面,既可以大大节省产品开发周期,又能降低AGV综合成本。
YZ-DH01机器人定位导航模块的硬件框图
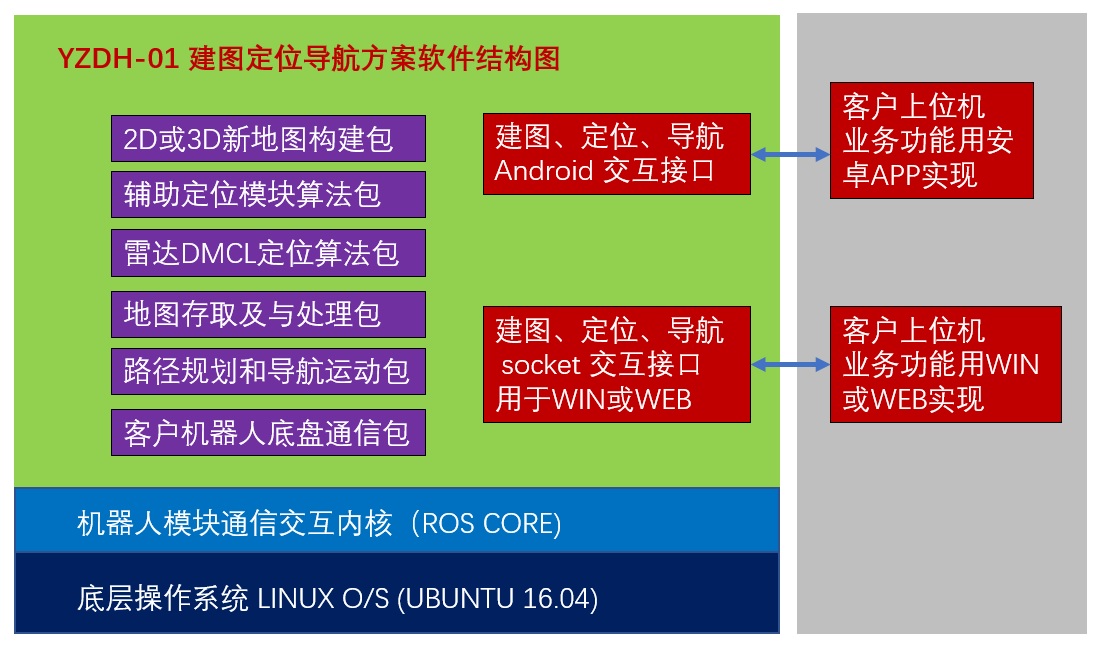
 YZ-DH01机器人定位导航模块的软件框图
YZ-DH01机器人定位导航模块的软件框图
 使用璞数导航技术的机器人部分案例
使用璞数导航技术的机器人部分案例
部分合作客户案例
使用YZ-DH01导航方案,机器人和AGV产品开发者可以把定位导航功能当作一个标准部件使用,这样就只需要把研发精力放在机器人AGV要实现的业务功能层面,既可以大大节省产品开发周期,又能降低AGV综合成本。
YZ-DH01机器人定位导航模块的硬件框图
YZ-DH01机器人定位导航模块的软件框图
使用璞数导航技术的机器人部分案例
紫外杀毒机器人 |
酒店送物机器人 |
机房巡检机器人 |
监狱巡更机器人 |
厂区巡逻机器人 |
信号测绘机器人 |
部分合作客户案例
 |
 |
 |
 |
 |